Buongiorno a tutti,
ecco il secondo articolo della nostra rubrica dedicata all’image processing e ai suoi segreti! Dopo aver esplorato la procedura di segmentazione, oggi vedremo del dettaglio un’operazione preliminare molto importante, ovvero la calibrazione della videocamera. In particolare, divideremo l’operazione di calibrazione in due diverse tipologie: la calibrazione intrinseca e la calibrazione estrinseca (o stereocalibrazione).
Per definizione, la calibrazione intrinseca di uno strumento di misura è un operazione mirata ad aumentarne l’accuratezza: nell’ambito della video-analisi, lo strumento di misura è rappresentato dalla camera video, mentre l’obbiettivo della calibrazione consiste nella correzione della distorsione ottica introdotta dalle lenti della camera stessa.
La distorsione può essere di due tipi: se la curva ha una forma concava avremo una distorsione a barile, se invece la curva ha una forma convessa avremo una distorsione a cuscino.

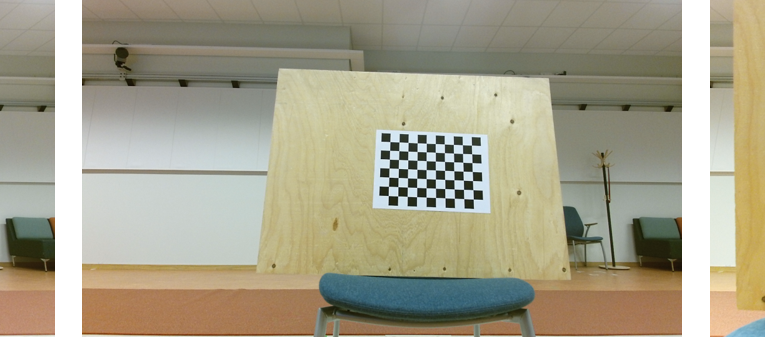
Per correggere questo difetto bisogna prima di tutto conoscere i cosiddetti parametri intrinseci della camera, ovvero la lunghezza focale, il centro dell’immagine e il fattore di distorsione radiale. Essi possono essere ricavati tramite una procedura di calibrazione che prevede l’acquisizione di alcuni fotogrammi in cui un elemento di geometria nota (tradizionalmente una scacchiera) viene posizionato in alcuni punti della scena con differenti angolazioni.

Tramite appositi algoritmi l’oggetto di calibrazione viene poi identificato in tutti i frames acquisiti, consentendo di applicare le informazioni sulla sua geometria per dedurre la relazione la scena digitale (pixel) e spazio reale.
Una volta ottenuti i parametri intrinseci precedentemente elencati è possibile effettuare la procedura di rettificazione dell’immagine, al fine di correggere la distorsione ottica.
La calibrazione estrinseca è invece necessaria quando si vuole acquisire un soggetto con due o più videocamere per poi ricostruirlo tridimensionalmente. In base alla propria posizione ogni camera avrà una determinata inquadratura dell’oggetto e quindi le immagini registrate saranno una diversa dall’altra.
La procedura di stereocalibrazione punta quindi a conoscere la posizione relativa tra le due camere, in modo tale da poter “sovrapporre” le rispettive acquisizioni in fase di ricostruzione.
La prima parte di questa procedura comprende la calibrazione intrinseca precedentemente descritta, in quanto è fondamentale conoscere i parametri di ciascuna camera prima di metterle in relazione tra loro.
Nella stereocalibrazione, però, è consigliabile acquisire molte più immagini di calibrazione: infatti ciascun fotogramma sarà elaborato non solo per ottenere i parametri intrinseci di correzione ottica ma anche per dedurre la posizione assoluta (nello spazio) e relativa (una camera rispetto all’altra). Grazie a queste informazioni sarà possibile ricostruire tridimensionalmente l’oggetto nello spazio.

Il risultato di questo processo è analogo a quanto avviene per la nostra vista: infatti l’esempio più concreto di stereoscopia sono proprio i nostri occhi. Essi sono paragonabili due “videocamere” posizionate ed orientate in maniera differente sulla nostra testa: l’obiettivo è proprio quello di avere due inquadrature differenti della medesima scena.
Ovviamente i nostri occhi sono già “calibrati”: per questo riusciamo con naturalezza a fondere le immagini di un occhio con quelle dell’altro, riuscendo a percepire anche la profondità di ciò che osserviamo.
Alla prossima puntata,
Giulio Figari
R&D & Tech Support Engineer
GPEM srl
 Il Motion Capture viene utilizzato per il monitoraggio degli spostamenti durante le prove strutturali, ed in particolare durante i test dinamici sismici su tavola vibrante. In pratica, un provino (ad esempio una porzione di un edificio in muratura in scala reale, come nella foto a destra) viene posizionato sopra una grande tavola vibrante in grado di riprodurre azioni sismiche. Si procede poi con una serie di simulazioni ad intensità crescente, misurando le oscillazioni (spostamenti e accelerazioni) indotte nella struttura esaminata. Grazie alla possibilità di eseguire misure a distanza, il motion capture è praticamente l’unico strumento per consentire un corretto ed accurato monitoraggio degli spostamenti, e quindi delle deformazioni, dei provini. Tra i maggiori pregi troviamo la possibilità di limitare i rischi per la strumentazione (in caso di collasso del provino solo i markers si danneggerebbero) e la possibilità di installare un elevato numero di marcatori, aumentando a piacimento i punti di misura senza particolari spese aggiuntive.
Il Motion Capture viene utilizzato per il monitoraggio degli spostamenti durante le prove strutturali, ed in particolare durante i test dinamici sismici su tavola vibrante. In pratica, un provino (ad esempio una porzione di un edificio in muratura in scala reale, come nella foto a destra) viene posizionato sopra una grande tavola vibrante in grado di riprodurre azioni sismiche. Si procede poi con una serie di simulazioni ad intensità crescente, misurando le oscillazioni (spostamenti e accelerazioni) indotte nella struttura esaminata. Grazie alla possibilità di eseguire misure a distanza, il motion capture è praticamente l’unico strumento per consentire un corretto ed accurato monitoraggio degli spostamenti, e quindi delle deformazioni, dei provini. Tra i maggiori pregi troviamo la possibilità di limitare i rischi per la strumentazione (in caso di collasso del provino solo i markers si danneggerebbero) e la possibilità di installare un elevato numero di marcatori, aumentando a piacimento i punti di misura senza particolari spese aggiuntive.
